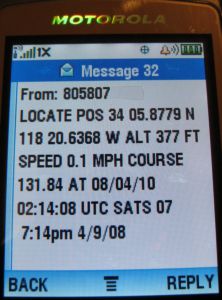

El Finder es un prototipo de dicho dispositivo. Se trata de un llavero del tamaño de dispositivo de GPS con dos botones, Guardar y Buscar. Si pulsa en Guardar los registros de su ubicación actual. Al pulsar Buscar visualmente conduce de nuevo a la ubicación guardada. Hasta 9 puntos pueden ser salvados.
Pulse el botón Guardar, y el dispositivo muestra S-1. Al pulsar en guardar de nuevo los pasos a través de las ranuras de hasta 9. Al pulsar Buscar, mientras que S-se muestra #, guarda la posición actual en la ranura elegida. La pantalla parpadea lentamente hasta el lugar se encuentra, entonces estrobos de forma rápida y se queda en blanco, indicando la ubicación se guarda. Al pulsar cualquier botón se detendrá el proceso y apagar el dispositivo.
Pulse el botón Buscar, y el dispositivo muestra F-1. Pulsando de nuevo la Búsqueda pasos a través de las ranuras de hasta 9. Si pulsa en Guardar, mientras que F-se muestra #, navega a la ubicación elegida. La pantalla parpadea mientras que el GPS tiene su posición, y luego cambia a una distancia de tres dígitos, en yardas o metros (m constante para ser agregado.) Comience a caminar hacia adelante cuando la distancia aparece. Un segmento de la pantalla parpadea, indicando la dirección a ir. Si el segmento superior del dedo medio parpadea, vaya todo recto. Si los segmentos a la izquierda de abrir y cerrar el centro, gire a la izquierda. Si los segmentos del derecho de abrir y cerrar el centro, gire a la derecha. Si uno de los segmentos inferior parpadea, la vuelta. Trate de mantener el segmento medio superior a parpadear. La distancia a contar hacia atrás a medida que se aproxima a su destino. Cuando haya terminado, pulse cualquier botón para apagar el dispositivo.
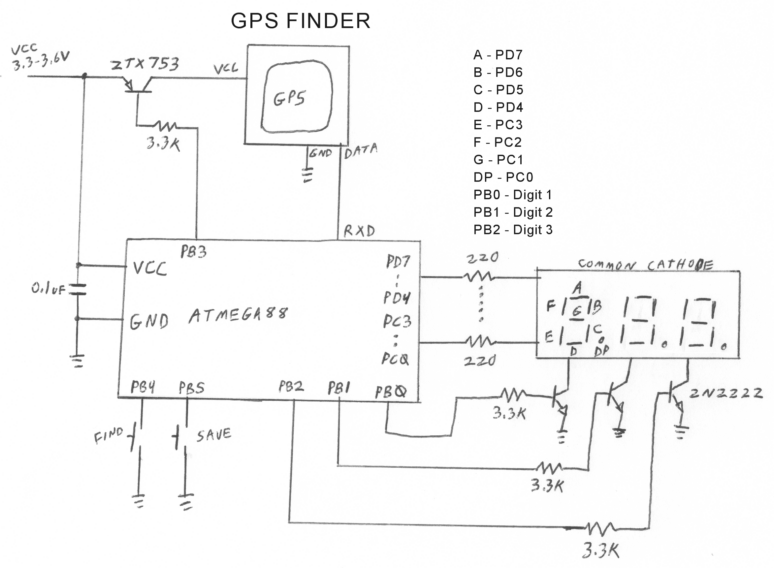
El Finder requiere un ATMEGA88 o más grandes, de tres dígitos, pantalla LED de cátodo común (Mouser BC56-11EWA o BC56-12GWA), un AARLOGIC GPS 3A módulo GPS o similar, y una batería de 3,6 voltios. Una batería de teléfono móvil (3.7V) o tres baterías NiMH funcionará. Si utiliza tres pilas alcalinas, utilice un diodo en serie para reducir el voltaje de 0,7 voltios. Otras partes necesarias cuatro transistores, doce resistencias, un condensador, y dos botones. El programa es de aproximadamente 3500 bytes de longitud.
El prototipo mostrado anteriormente cuenta con todas las partes montadas en la parte posterior de la pantalla, y sellado con una pistola de pegamento. Los cables de vuelo podrían ser fácilmente eliminadas. Yo resistencia de película gruesa paquetes en lugar de las resistencias individuales, y todo junto con cable de 30 hilos reproceso calibre.
Otras cosas que debe saber: Si deja el dispositivo en modo S F o sin seleccionar una ubicación, se apagará automáticamente. Si usted intenta encontrar una ubicación y recibe ---, que la ubicación no se ha guardado. Las ubicaciones se almacenan en la EEPROM de 24 bytes. Si la distancia es de más de 1000 yardas / metros, los puntos decimales indican el 1000 en binario. Si el decimal más a la derecha se enciende y la pantalla indica 430, la distancia real es 1430. Si están encendidos más a la izquierda y decimal centro, la distancia es de 6430.
¿Cómo funciona: El Finder utiliza el algoritmo de navegación Gran Círculo se explica en este artículo de Circuit Cellar Stefan123.pdf por Jeff Stefan. El algoritmo tiene el Desde y LAT / LON pares, hace un poco de aritmética y trigonometría, y calcula la distancia y el rumbo que el camino más corto en la superficie de una esfera. A continuación, resta el curso actual, indicado por el módulo GPS, desde el curso calcula y muestra el curso relativo, que es la dirección que debe caminar.
El programa de usos 64-bit, en complemento a dos aritmética. Para la mayoría de los cálculos de radianes, el primer byte es un número entero y el resto fraccionado, por lo que dividir el entero binario de 2 ^ 56 para obtener el número decimal. El algoritmo de Gran Círculo COS requiere precisión y ARCCOS funciones. La función COS es una aproximación polinomial. Las funciones ARCCOS miré eran muy complejos: uno necesita dos polinomios, una raíz cuadrada, y una división. Por lo tanto, mi ARCCOS utiliza el método de Newton para invertir la función COS. Que es compacto, pero relativamente lento, y el algoritmo requiere unos 1,3 millones de ciclos de máquina para calcular un gran círculo. El GPS proporciona una revisión por segundo, y la CPU se ejecuta a 8 MHz, por lo que este no es óptimo, pero es mucho lo suficientemente rápido para este proyecto.
Hay un programa de prueba para comprobar el programa de navegación. Para usarlo, permiten SERIAL_DEBUG en el código, montarlo, y lo cargan en un microcontrolador. Conecte el MCU TXD y RXD líneas a un PC usando un CMOS-convertidor de USB a nivel de serie, o un chip MAX3232. El programa de prueba en el PC impulsa el microcontrolador a través de un puerto serie, y el control de su producción.
Usted necesitará los controladores de comunicación de serie de www.rxtx.org y un kit de desarrollo Java. Compilar y ejecutar TestNav.java utilizando la línea de comandos en la parte superior del archivo de origen. Los parámetros son el número de puerto, la tasa de baudios (9600), y el número de iteraciones. Cada iteración un par de pruebas a distancia (puntos aleatorios en el planeta) y un par cercano (un punto al azar y aleatoria pequeña compensación.) La precisión de la navegación es buena en distancias largas, pero decae la precisión direccional algo menos de cien metros. Esto no es único para el Finder, me encontré en una de las ecuaciones HP48GX y consiguió resultados diferentes tanto desde el Finder y las bibliotecas de matemáticas de Java. Que esto es difícil de obtener resultados precisos con ángulos pequeños.
El código Finder cuenta los posibles usos, además de un navegador de la computadora de mano, por ejemplo, la salida de dirección podría dirigir un vehículo autónomo pequeño.
El código fuente v0.1 para la ATMEGA88.
Abierto el fusible CKDIV8, por lo que el MCU funciona a 8 MHz.
Please post en el foro, si usted está construyendo una Finder.
Bueno, teneis que perdonad la traducción que es la literal de Google. Espero que os haya interesado tanto como para interar construirlo. Saludos





0 comentarios